Tetapan alat adalah operasi utama dan kemahiran penting dalam pemesinan CNC. Di bawah keadaan tertentu, ketepatan tetapan alat boleh menentukan ketepatan pemesinan bahagian. Pada masa yang sama, kecekapan tetapan alat juga secara langsung mempengaruhi kecekapan pemesinan CNC. Tidak cukup hanya mengetahui kaedah penetapan alat. Anda juga mesti mengetahui pelbagai kaedah tetapan alat sistem CNC dan cara memanggil kaedah ini dalam program pemprosesan. Pada masa yang sama, anda mesti mengetahui kelebihan, keburukan, dan keadaan penggunaan pelbagai kaedah tetapan alat.

1. Prinsip tetapan pisau
Tujuan penetapan alat adalah untuk mewujudkan sistem koordinat bahan kerja. Secara intuitif, tetapan alat adalah untuk menetapkan kedudukan bahan kerja dalam meja kerja alat mesin. Malah, ia adalah untuk mencari koordinat titik tetapan alat dalam sistem koordinat alat mesin.
Untuk mesin pelarik CNC, titik tetapan alat mesti terlebih dahulu dipilih sebelum diproses. Titik tetapan alat merujuk kepada titik permulaan pergerakan alat berbanding bahan kerja apabila alat mesin CNC digunakan untuk memproses bahan kerja. Titik tetapan alat boleh ditetapkan pada bahan kerja (seperti datum reka bentuk atau datum kedudukan pada bahan kerja), atau ia boleh ditetapkan pada lekapan atau alat mesin. Jika ia ditetapkan pada titik tertentu pada lekapan atau alat mesin, titik tersebut mestilah konsisten dengan datum kedudukan bahan kerja. Mengekalkan hubungan dimensi dengan tahap ketepatan tertentu.
Apabila menetapkan alat, titik kedudukan alat hendaklah bertepatan dengan titik tetapan alat. Titik kedudukan alat yang dipanggil merujuk kepada titik rujukan kedudukan alat. Untuk alat memusing, titik kedudukan alat ialah hujung alat. Tujuan penetapan alat adalah untuk menentukan nilai koordinat mutlak titik tetapan alat (atau asal bahan kerja) dalam sistem koordinat alat mesin dan mengukur nilai sisihan kedudukan alat alat tersebut. Ketepatan penjajaran mata alat secara langsung mempengaruhi ketepatan pemesinan.
Apabila sebenarnya memproses bahan kerja, menggunakan satu alat secara amnya tidak dapat memenuhi keperluan pemprosesan bahan kerja, dan berbilang alat biasanya digunakan untuk pemprosesan. Apabila menggunakan berbilang alat pusing untuk pemprosesan, apabila kedudukan perubahan alat kekal tidak berubah, kedudukan geometri titik hujung alat akan berbeza selepas penukaran alat, yang memerlukan alatan berbeza untuk dapat memproses pada kedudukan permulaan yang berbeza apabila memulakan pemprosesan. Pastikan program berjalan seperti biasa.
Alat CNC Xinfa mempunyai ciri-ciri kualiti yang baik dan harga yang rendah. Untuk butiran, sila layari:
Pengeluar Alat CNC - Kilang & Pembekal Alat CNC China (xinfatools.com)
Untuk menyelesaikan masalah ini, sistem CNC alat mesin dilengkapi dengan fungsi pampasan kedudukan geometri alat. Menggunakan fungsi pampasan kedudukan geometri alat, anda hanya perlu mengukur sisihan kedudukan setiap alat berbanding alat rujukan yang telah dipilih terlebih dahulu dan memasukkannya ke dalam sistem CNC. Tentukan nombor kumpulan dalam lajur pembetulan parameter alat dan gunakan arahan T dalam program pemesinan untuk mengimbangi sisihan kedudukan alat secara automatik dalam laluan alat. Pengukuran sisihan kedudukan alatan juga perlu dicapai melalui operasi penetapan alatan.
2. Kaedah tetapan pisau
Dalam pemesinan CNC, kaedah asas penetapan alat termasuk kaedah pemotongan percubaan, penetapan alat penetapan alat dan penetapan alat automatik. Artikel ini mengambil mesin pengilangan CNC sebagai contoh untuk memperkenalkan beberapa kaedah tetapan alat yang biasa digunakan.
1. Kaedah pemotongan percubaan dan penetapan pisau
Kaedah ini mudah dan mudah, tetapi ia akan meninggalkan kesan pemotongan pada permukaan bahan kerja dan mempunyai ketepatan tetapan alat yang rendah. Mengambil titik tetapan alat (yang bertepatan dengan asal sistem koordinat bahan kerja) di tengah permukaan bahan kerja sebagai contoh, kaedah tetapan alat dua hala digunakan.
(1) Tetapan alat dalam arah x dan y.
① Pasang bahan kerja pada meja kerja melalui pengapit. Apabila mengapit, perlu ada ruang untuk tetapan alat pada empat sisi bahan kerja.
② Mulakan gelendong untuk berputar pada kelajuan sederhana, gerakkan meja kerja dan gelendong dengan cepat, biarkan alat cepat bergerak ke kedudukan dengan jarak selamat tertentu dekat dengan sebelah kiri bahan kerja, dan kemudian kurangkan kelajuan dan gerakkan dekat ke kiri sisi bahan kerja.
③ Apabila menghampiri bahan kerja, gunakan operasi penalaan halus (biasanya 0.01mm) untuk mendekat, dan biarkan alat perlahan-lahan menghampiri bahagian kiri bahan kerja supaya alat hanya menyentuh permukaan sebelah kiri bahan kerja (perhatikan, dengar bunyi pemotongan, lihat tanda pemotongan, dan lihat cip, selagi Jika situasi berlaku, yang bermaksud alat menyentuh bahan kerja), kemudian berundur 0.01mm. Tulis nilai koordinat yang dipaparkan dalam sistem koordinat alat mesin pada masa ini, seperti -240.500.
④Tarik balik alat dalam arah z positif ke atas permukaan bahan kerja. Gunakan kaedah yang sama untuk mendekati bahagian kanan bahan kerja. Catatkan nilai koordinat yang dipaparkan dalam sistem koordinat alat mesin pada masa ini, seperti -340.500.
⑤Mengikut ini, nilai koordinat asal sistem koordinat bahan kerja dalam sistem koordinat alat mesin ialah {-240.500+(-340.500)}/2=-290.500.
⑥Begitu juga, nilai koordinat asal sistem koordinat bahan kerja dalam sistem koordinat alat mesin boleh diukur.
(2) Tetapan alat dalam arah z.
① Gerakkan alat dengan cepat ke atas bahan kerja.
② Mulakan gelendong untuk berputar pada kelajuan sederhana, gerakkan meja kerja dan gelendong dengan cepat, biarkan alat dengan cepat bergerak ke kedudukan yang dekat dengan permukaan atas bahan kerja pada jarak selamat tertentu, dan kemudian kurangkan kelajuan untuk menggerakkan muka hujung alat dekat dengan permukaan atas bahan kerja.
③ Apabila menghampiri bahan kerja, gunakan operasi penalaan halus (biasanya 0.01mm) untuk mendekat, supaya muka hujung alat perlahan-lahan menghampiri permukaan bahan kerja (perhatikan bahawa apabila alat, terutamanya pengisar akhir, adalah yang terbaik untuk dipotong di tepi bahan kerja, kawasan di mana muka penghujung pemotong menyentuh permukaan bahan kerja Kurang daripada separuh bulatan, cuba jangan membuat lubang tengah pengisar hujung dipotong di bawah permukaan bahan kerja), buat muka hujung alat hanya sentuh permukaan atas bahan kerja, kemudian naikkan semula paksi, rekod nilai z dalam sistem koordinat alat mesin pada masa ini, -140.400 , kemudian nilai koordinat asal W sistem koordinat bahan kerja dalam sistem koordinat alat mesin ialah -140.400.
(3) Masukkan nilai x, y, z yang diukur ke dalam alamat storan sistem koordinat bahan kerja alat mesin G5* (biasanya menggunakan kod G54~G59 untuk menyimpan parameter tetapan alat).
(4) Masukkan mod input panel (MDI), masukkan “G5*”, tekan kekunci mula (dalam mod automatik), dan jalankan G5* untuk berkuat kuasa.
(5) Periksa sama ada tetapan alat adalah betul.
2. Tolok Feeler, mandrel standard, kaedah tetapan alat tolok blok
Kaedah ini adalah serupa dengan kaedah penetapan alat pemotong percubaan, kecuali gelendong tidak berputar semasa penetapan alat. Tolok perasa (atau mandrel standard atau tolok blok) ditambah antara alat dan bahan kerja. Tolok perasa tidak boleh bergerak dengan bebas. Beri perhatian kepada pengiraan. Apabila menggunakan koordinat, ketebalan tolok perasa hendaklah dikurangkan. Oleh kerana gelendong tidak perlu berputar untuk memotong, kaedah ini tidak akan meninggalkan kesan pada permukaan bahan kerja, tetapi ketepatan tetapan alat tidak cukup tinggi.
3. Gunakan alatan seperti pencari tepi, rod eksentrik dan penetap paksi untuk menetapkan alat.
Langkah-langkah operasi adalah serupa dengan kaedah tetapan alat pemotong percubaan, kecuali alat itu digantikan dengan pencari tepi atau rod eksentrik. Ini adalah kaedah yang paling biasa. Ia mempunyai kecekapan tinggi dan boleh memastikan ketepatan tetapan alat. Apabila menggunakan pencari tepi, penjagaan mesti diambil untuk memastikan bahagian bola keluli bersentuhan sedikit dengan bahan kerja. Pada masa yang sama, bahan kerja yang akan diproses mestilah konduktor yang baik dan permukaan rujukan kedudukan mesti mempunyai kekasaran permukaan yang baik. Penetap paksi z biasanya digunakan untuk kaedah tetapan alat pemindahan (tidak langsung).
4. Kaedah tetapan pisau pemindahan (tidak langsung).
Memproses bahan kerja selalunya memerlukan penggunaan lebih daripada satu pisau. Panjang pisau kedua berbeza dengan panjang pisau pertama. Ia perlu disifarkan semula. Walau bagaimanapun, kadangkala titik sifar dimesin dan titik sifar tidak boleh diambil secara langsung, atau titik sifar tidak boleh diambil secara langsung. Ia dibenarkan merosakkan permukaan yang diproses, dan terdapat beberapa alat atau situasi yang sukar untuk menetapkan alat secara langsung. Dalam kes ini, kaedah perubahan tidak langsung boleh digunakan.
(1) Untuk pisau pertama
① Untuk pisau pertama, masih menggunakan kaedah pemotongan percubaan, kaedah tolok perasa, dsb. Tuliskan koordinat alat mesin z1 asal bahan kerja pada masa ini. Selepas alat pertama diproses, hentikan gelendong.
② Letakkan penetap alat pada permukaan rata meja kerja alat mesin (seperti permukaan besar ragum).
③Dalam mod roda tangan, gunakan tangan untuk mengalihkan meja kerja ke kedudukan yang sesuai, gerakkan gelendong ke bawah, tekan bahagian atas penetap alat dengan hujung bawah pisau, dan penuding dail akan berputar, sebaik-baiknya dalam satu bulatan. Catatkan paksi pada masa ini. Tetapkan nilai paparan penetap dan kosongkan paksi koordinat relatif kepada sifar.
④ Angkat gelendong dan keluarkan pisau pertama.
(2) Untuk pisau kedua.
①Pasang pisau kedua.
② Dalam mod roda tangan, gerakkan gelendong ke bawah, tekan bahagian atas penetap alat dengan hujung bawah pisau, penuding dail akan berputar, dan penunjuk akan menghala ke kedudukan penunjuk A yang sama dengan pisau pertama.
③Rekodkan nilai z0 yang sepadan dengan koordinat relatif paksi pada masa ini (dengan tanda positif dan negatif).
④ Naikkan gelendong dan keluarkan penetap alat.
⑤Tambah z0 (dengan tanda tambah atau tolak) pada data koordinat z1 asal dalam G5* alat pertama untuk mendapatkan koordinat baharu.
⑥Koordinat baharu ini ialah koordinat sebenar alat mesin yang sepadan dengan asal bahan kerja alat kedua. Masukkannya ke dalam koordinat kerja G5* alat kedua. Dengan cara ini, titik sifar alat kedua ditetapkan. . Pisau yang tinggal ditetapkan dengan cara yang sama seperti pisau kedua.
Nota: Jika beberapa alat menggunakan G5* yang sama, langkah ⑤ dan ⑥ ditukar untuk menyimpan z0 dalam parameter panjang alat No. 2, dan panggil pembetulan panjang alat G43H02 apabila menggunakan alat kedua untuk pemesinan.
5. Kaedah tetapan pisau atas
(1) Tetapan alat dalam arah x dan y.
① Pasang bahan kerja pada meja kerja alat mesin melalui lekapan dan gantikannya dengan bahagian tengah.
② Gerakkan meja kerja dan gelendong dengan cepat untuk mengalihkan hujung dekat dengan bahan kerja, cari titik tengah garis lukisan bahan kerja, dan kurangkan kelajuan untuk menggerakkan hujung berhampiran dengannya.
③ Gunakan operasi penalaan halus, supaya hujung perlahan-lahan menghampiri titik tengah garis lukisan bahan kerja sehingga hujung hujung sejajar dengan titik tengah garis lukisan bahan kerja. Catatkan nilai koordinat x dan y dalam sistem koordinat alat mesin pada masa ini.
(2) Keluarkan pusat, pasang pemotong pengilangan, dan gunakan kaedah penetapan alat lain seperti kaedah pemotongan percubaan, kaedah tolok perasa, dan lain-lain untuk mendapatkan nilai koordinat paksi-z.
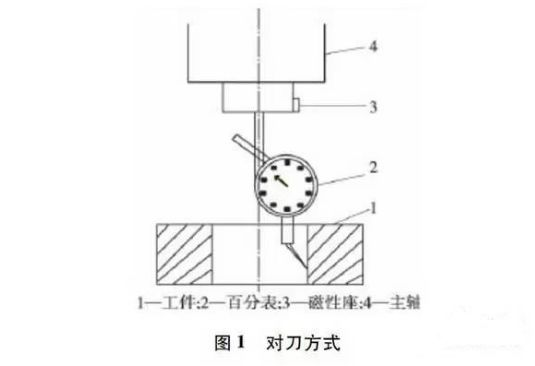
6. Kaedah penetapan alat penunjuk dail (atau penunjuk dail).
Penunjuk dail (atau penunjuk dail) kaedah tetapan alat (biasanya digunakan untuk tetapan alat bahan kerja bulat)
(1) Tetapan alat dalam arah x dan y.
Pasang rod pelekap penunjuk dail pada pemegang alat, atau pasangkan tempat duduk magnet penunjuk dail pada lengan gelendong. Gerakkan meja kerja supaya garis tengah gelendong (iaitu, tengah alat) bergerak lebih kurang ke tengah bahan kerja, dan laraskan tempat duduk magnet. Panjang dan sudut rod teleskopik adalah sedemikian rupa sehingga sentuhan penunjuk dail menyentuh permukaan lilitan bahan kerja. (Penunjuk berputar kira-kira 0.1mm.) Pusingkan gelendong dengan tangan perlahan-lahan untuk membuat sesentuh penunjuk dail berputar di sepanjang permukaan lilitan bahan kerja. Perhatikan Untuk memeriksa pergerakan penunjuk penunjuk dail, perlahan-lahan gerakkan paksi meja kerja dan ulangi beberapa kali. Apabila gelendong diputar, penunjuk penunjuk dail pada asasnya berada pada kedudukan yang sama (apabila kepala meter berputar sekali, jumlah lonjakan penunjuk adalah Dalam ralat tetapan alat yang dibenarkan, seperti 0.02mm), ia boleh dianggap bahawa pusat gelendong ialah paksi dan asal paksi.
(2) Tanggalkan penunjuk dail dan pasangkan pemotong pengilangan, dan gunakan kaedah tetapan alat lain seperti kaedah pemotongan percubaan, kaedah tolok perasa, dan lain-lain untuk mendapatkan nilai koordinat paksi-z.
7. Kaedah penetapan alat dengan penetap alat khas
Kaedah tetapan alat tradisional mempunyai kelemahan seperti keselamatan yang lemah (seperti tetapan alat tolok perasa, hujung alat mudah rosak akibat perlanggaran keras), mengambil banyak masa mesin (seperti pemotongan percubaan, yang memerlukan pemotongan berulang beberapa kali ), dan ralat rawak besar yang disebabkan oleh manusia. Ia telah disesuaikan dengan Tanpa irama pemesinan CNC, ia tidak kondusif untuk memberikan permainan sepenuhnya kepada fungsi alat mesin CNC.
Menggunakan penetap alat khas untuk menetapkan alat mempunyai kelebihan ketepatan tetapan alat yang tinggi, kecekapan tinggi dan keselamatan yang baik. Ia memudahkan kerja penetapan alat yang membosankan yang dijamin oleh pengalaman dan memastikan kecekapan tinggi dan ketepatan tinggi alatan mesin CNC. Ia telah menjadi Alat khas yang sangat diperlukan untuk penetapan alat pada mesin pemprosesan CNC.
Masa siaran: Nov-01-2023


